Океан в значительной степени недоступен для научных исследований и промышленного применения. Но благодаря фотограмметрии его можно картографировать.
В статье рассматривается новый подход к подводной фотограмметрии. Картографирование с подводных изображений крайне затруднено из-за несогласованных условий освещения и изменения показателей преломления, а также потери цвета из-за ограниченного расстояния проникновения определенных длин волн.
Использование под водой
В последние годы фотограмметрия распространилась от аэрофотосъемки до наземной, а теперь и подводной. Использование фотограмметрии под водой все еще находится на стадии исследования, но потребность уже существует в определенных отраслях, таких как экологический мониторинг, археология, криминалистика и инспекция инфраструктуры.
С измеримой 3D-моделью или 2D-картой города, обломки корабля или самолета могут быть зафиксированы на месте реконструкции; мостовые опоры могут быть проверены на техническое обслуживание и ремонт; древнее культурные артефакты могут быть сопоставлены и архивированы для дальнейших исследований; заповедные территории могут быть повторно обследованы для обнаружения изменений окружающей среды и многое другое.
Новый процесс: дистанционное получение изображений
Распространенной практикой во многих подводных проектах является получение изображений с помощью замедленной съемки (time-lapse) с камеры, движущейся над или вокруг интересующего объекта. Однако это создает много проблем в постобработке, так как, в отличие от поверхности, скорость движения под водой нельзя точно оценить. Если изображения основаны на времени, водолазы будут получать слишком много изображений во время плавания против течения и недостаточно изображений при движении с ним.
Такое несогласованное наложение изображений либо требует большой ручной работы для удаления ненужных изображений, либо рискует испортить калибровку из-за коротких базовых линий или потери соседних изображений.
Новый метод получения изображения, разработанный Geolab, требует команды профессиональных дайверов. Для их оффшорных проектов было привлечено по крайней мере четыре профессиональных дайвера (включая одного оператора лодки и одного или двух фотографов) вместе с координатором проекта. Каждый из членов команды играет важную роль в процессе получения изображения.
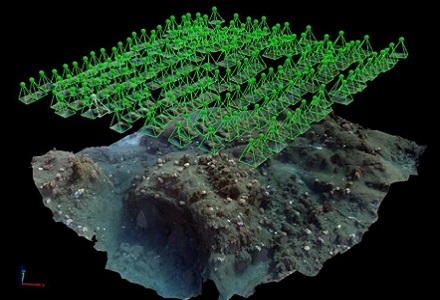
Процесс позволяет водолазам знать точное положение, в котором каждое изображение должно быть сделано, вместо того, чтобы делать снимки случайным образом на основе промежутка времени. Дайверы вручную запускают камеру в определенных местах в зависимости от расстояния до объекта и предыдущих изображений. Это приводит к более точному плану получения изображений, более легкой и более точной 3D, одновременно оптимизируя драгоценное время, проведенное под водой.
Однако картирование под водой все еще намного сложнее, чем на суше. Свет не проходит через воду точно так же, как через воздух, из-за разной скорости света. Кроме того, мелкие частицы, взвешенные в воде, могут значительно влиять на видимость под водой. Водолазы должны знать основы фотограмметрии и адаптировать процедуру сбора под водой в зависимости от условий видимости, которые они наблюдают на месте.
Повышение точности подводного картографирования
Для специалистов картографии и геодезистов важна точность. В настоящий момент большинство проектов подводного картографирования все еще являются экспериментами. Хотя изображения могут быть получены, это может быть борьба за точную реконструкцию точной 3D-сцены или 2D-карты. Поскольку был разработан оптимальный способ захвата изображений для картографирования, следующим шагом является обеспечение точности 3D-реконструкции и возможность геолокации своих проектов по отношению к глобальной системе координат.
Вот как команда с Geolab решила эту проблему:
Точные измерения для точных карт

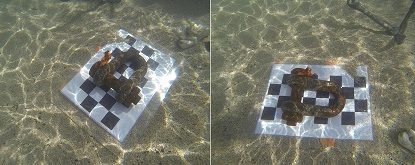
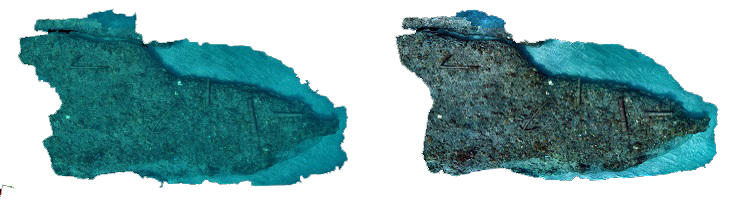
Убедившись, что Pix4Dmapper может правильно калибровать камеру, важно масштабировать проекты до их истинных размеров. На основе общего метода масштабирования, используемого в rayCloud Pix4Dmapper, линейки или настраиваемые масштабные линейки были размещены в области отображения, и их измерение было назначено в Pix4Dmapper для масштабирования всего проекта.
Эти инструменты масштабирования должны быть максимально удобными и располагаться перпендикулярно друг другу, чтобы уменьшить относительную ошибку длины и возможную ошибку в одном направлении. Чтобы убедиться, что 3D-реконструкция является точной, на месте могут быть размещены дополнительные масштабные линейки. Они могут использоваться для оценки программно-вычисленных измерений после шага масштабирования, чтобы соответствовать их фактическим размерам. Эта проверка может обеспечить точность любого двухмерного или трехмерного измерения в проекте, что важно для любой картографической работы. Легко понять необходимость точных размеров кораблекрушений, площади покрытия коралловых рифов, длины трещин на пристани моста и так далее.
Донные контрольные точки

Подобно методам аэрофотосъемки, некоторые металлические метки были также размещены на месте, хорошо распределены по исследуемой области. Хотя они не являются обязательными, они помогают программному обеспечению находить и сопоставлять идентичные точки на разных изображениях и могут использоваться в качестве наземных контрольных точек (GCP) для географической привязки проекта с помощью специальной подводной и бортовой процедуры, не описанной здесь.
Ограничения глубины и визуальные аспекты
На мелководье, скажем, глубиной менее трех метров, распространенной проблемой является изменение световых схем, освещающих отображаемую область между изображениями. Это может произойти, когда прямые солнечные лучи попадают на поверхность воды. Поверхностные волны создают многочисленные вогнутые и выпуклые линзы, которые отражают и преломляют свет очень сложным и непредсказуемым образом. Содержание изображений, изображающих один и тот же объект, может сильно отличаться от одного изображения к другому, что приводит к сложной обработке фотограмметрии.
Это объясняет, почему для проектов подводного картографирования проекты в мелководных регионах могут быть чрезвычайно трудными.
Однако углубление не обязательно означает уход от легких проблем. Когда свет распространяется в воде, он поглощается, преломляется или отражается, и каждая длина волны ведет себя по-разному, что приводит к разному расстоянию пробега под водой.
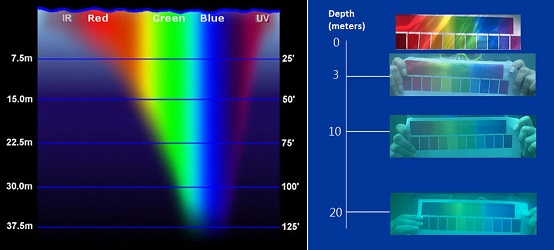
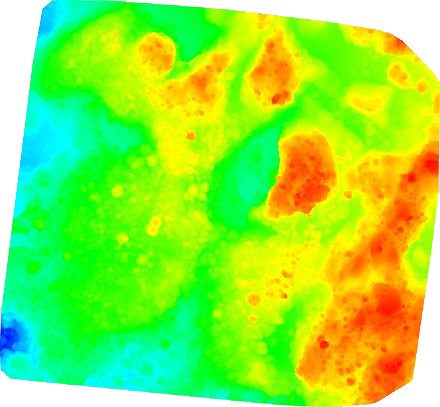
Следующая диаграмма демонстрирует теоретическое расстояние, на которое свет проникает под воду, в зависимости от длины волны и связанной с этим потери цвета. Мы видим, что подводная среда становится темнее пропорционально расстоянию от поверхности. Хотя короткие волны обладают большей энергией и проникают дальше, они все же преломляются и поглощаются. Мимо глубины 40 метров виден только синий свет и происходит быстрая потеря света.
Цвет или качество?
Для проектов, выполняемых на глубине от 5 до 25 метров под водой, изображения с достаточным освещением могут быть получены путем установки более высоких значений ISO и увеличения времени экспозиции: однако это ухудшает качество изображения. К сожалению, это очень распространено для подводной съемки и более широко для подводной фотографии. Чтобы смягчить это или если проекты выходят за пределы 30-40 метров, потребуется искусственное освещение, но обеспечение равномерного освещения на нанесенной на карту области будет еще одной проблемой, с которой придется столкнуться.
Поскольку все длины волн света не проникают в воду одинаково, визуальное воздействие на захваченные изображения является сильным. На средней глубине фильтры могут быть размещены перед камерой, чтобы помочь захватывать больше определенных длин волн, но на более низких глубинах некоторые цвета больше не присутствуют, и единственный способ вернуть их снова - ввести искусственный свет.
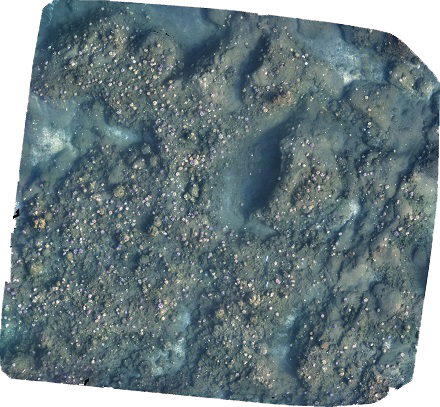
Тем не менее, снятые изображения могут быть откорректированы по цвету в программном обеспечении для редактирования изображений перед процессом фотограмметрии. В некоторой степени это может помочь восстановить более естественные цвета при сохранении непрерывности интенсивности цвета. Это не обязательный шаг, поскольку исходные изображения также могут давать точные результаты с помощью программного обеспечения Pix4D, однако это дает более приятный визуальный результат, что может быть очень полезно для некоторых приложений, таких как мониторинг коралловых рифов.
Что дальше
Благодаря программному обеспечению для фотограмметрии Pix4D и технологиям сбора данных Geolab теперь возможно точное подводное картирование, хотя обе компании все еще развивают эту технологию. В ближайшем будущем Geolab планирует обновить настройки своих камер и в конечном итоге адаптировать их метод сбора данных к дистанционно управляемым транспортным средствам (ROV), а Pix4D улучшит свой текущий рабочий процесс для обработки подводных изображений.
Благодаря предварительно откалиброванной базе данных камер Pix4D Pix4Dmapper способен восстанавливать 3D с очень коротким временем обработки.
Однако, поскольку основное внутреннее фокусное расстояние камеры существенно изменяется под водой, что нарушает допущения для общих случаев аэрофотосъемки и наземного картографирования, потребуются более адаптируемые варианты обработки. Pix4D и Geolab будут сотрудничать в будущих проектах и помогать друг другу в продвижении, продвигая развитие под поверхностью воды.
Автор: Лиза Чен (Pix4D), Ромен Пинель (Geolab: www.geolab.re )
Оригинал статьи опубликован в блоге Pix4D.



комментарии